

Hi!
I finished my robot arm and when I try to calibrate each motor J5 doesn't go properly.
When I try to calibrate the J5 it's moving little bit and it's shows "calibration successfully". The reading for arm position is -104deg. From this point it's not going further. If I try to move it -10deg more it's says J5 limit and if I try to move +10deg it's trying to go further but no more room as the motor is at his limit. So it's kind of stuck into this position. I change the Teensy 3.5 board, signal cable from encoder and encoder for J5.

In the assembly manual its says/shows how to connect the cables from encoder in the robot arm box.
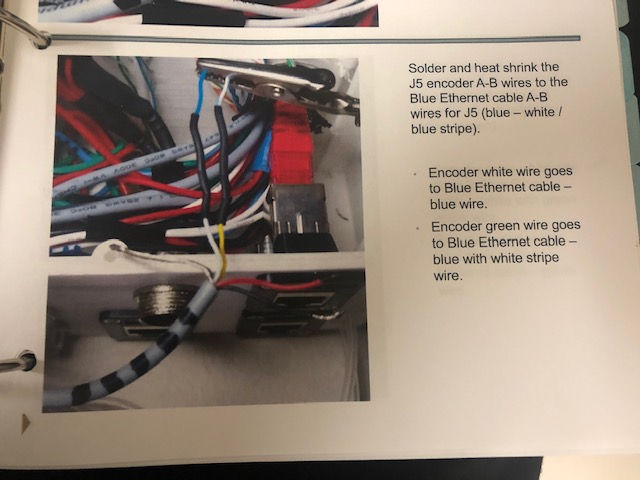
Did I miss anything? It's says to connect the green wire. I don't have any green wire.
Where is the wire mesh on this picture going/connecting?
Any ideas or suggestions to solve this J5 calibration problem?
I would appreciate the help!
It looks like the J5 limit switch is likely returning +5v when it shouldnt. I would check pin 30 on the teensy board and make sure you are seeing -5v when the switch is not made and +5v when the switch is made.